

本项目是 Brian Pot Heredia、Alex Jakobuss 团队在徐竹田老师指导下完成的 ME3220 设计与制造 II 课程项目,灵感来源于蚱蜢快速释放弹性势能的生物特性,聚焦小型跳跃机器人的研发。机器人以连杆机构为核心,采用紧凑型腿结构设计,通过电机缠绕绳索压缩腿部姿态实现拉簧储能,搭配行星轮系 - 滑轮分离式释放机构,在预设负载条件下触发电机反转,使驱动系统与腿部脱离,让绳索快速 unwind、腿部伸展完成起跳,整体采用 3D 打印外壳、机械加工特征及钢销转动关节等轻量化、可制造性强的部件,旨在解决轮式平台难以跨越障碍的问题,适用于需要灵活跨越障碍的移动场景
本项目的核心目标是最大化跳跃机器人的可重复跳跃高度,关键在于在给定质量和体积约束下,尽可能储存更多弹性势能,并通过可靠的触发机制快速释放能量。同时,需满足紧凑型连杆式腿部架构设计要求,确保部件质量轻、易于制造,实现能量的可控储存与安全释放,通过齿轮系减速提供足够扭矩以完成准静态储能,保障释放机构在负载下能干净脱离,最终打造一款具备高效跳跃能力、结构紧凑且运行可靠的小型跳跃机器人。
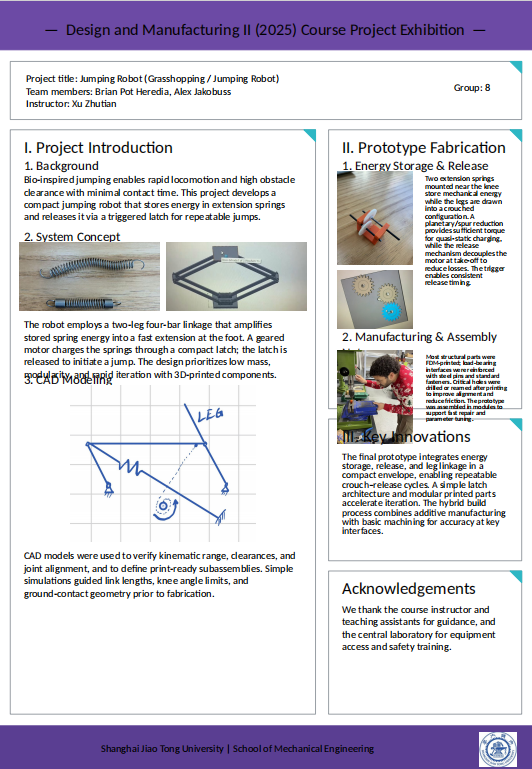
项目已成功完成跳跃机器人的设计、建模、原型制作与核心功能验证,达成预设的核心目标。设计层面,确定了双腿四连杆机构方案,在膝盖附近安装两根拉伸弹簧储存机械能,开发了行星轮系 - 滑轮分离式释放机构,明确了 “电池 - 电机扭矩 - 绳索缠绕 - 弹簧拉伸 - 触发脱离 - 弹簧与连杆伸展 - 跳跃” 的能量传递路径,并通过 CAD 建模验证了运动范围、间隙及关节对齐情况。原型制作层面,采用 FDM 3D 打印制造大部分结构件,在承重接口处用钢销和标准紧固件加固,关键孔位经钻孔或铰孔处理以提高对齐度和减少摩擦,模块化装配便于快速维修和参数调整。功能验证层面,成功实现了 “储能(缠绕绳索)- 触发(电机反转)- 释放(自由 unwind)- 伸展起跳” 的完整核心循环,验证了设计的可行性与可靠性,为后续补充跳跃高度、循环时间、重复性等实测性能数据奠定了坚实基础。
