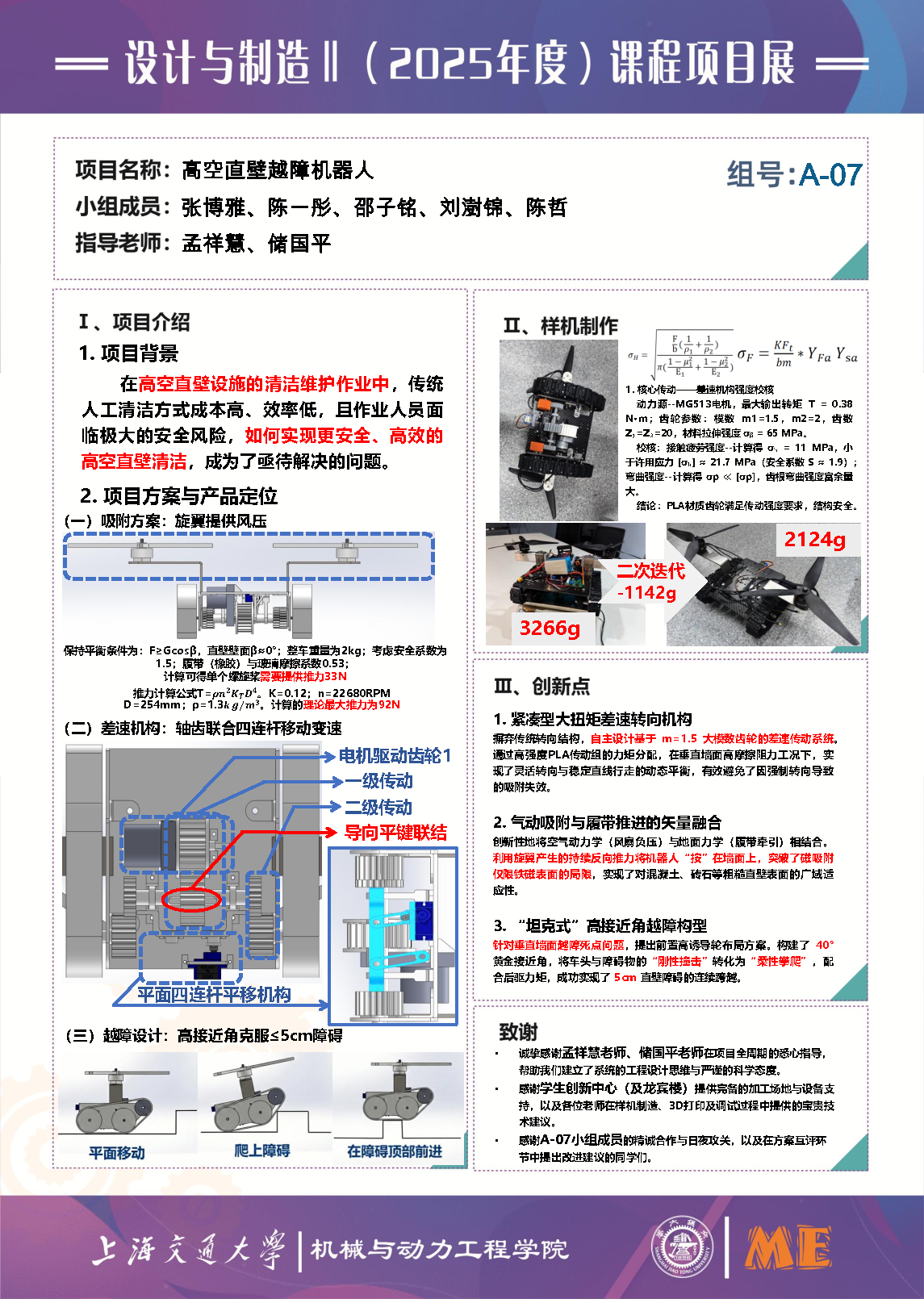
为解决高空作业高风险难题,本项目研发一种具备强吸附、灵活移动和越障能力的爬壁机器人。它可在玻璃幕墙、风电塔筒等垂直壁面替代“蜘蛛人”执行清洁、检测等任务,实现高空作业的自动化与本质安全。
解决高空壁面工作坠亡事故发生率高的问题,研制出一款具有吸附能力、移动能力、越障能力的高空直壁越障机器人,用机器人代替人实现高空作业。
成功研制出一款直壁越障机器人,可以实现壁面吸附、跨越障碍和转向等功能,可以进一步增加作业机构完成直壁越障任务。