
现代社会的基础设施,如电力杆塔、路灯杆的检查、维护、监测是必不可少且高频次的工作。因此,市场需要一种能够代替人工攀爬,自主灵活且具备一定作业能力的爬杆机器人。本项目设计并实现了一种夹持型轮式爬杆机器人,并研究了其抱杆,爬升,避障的问题。
本项目旨在开发一款具有多功能性、能够在不同形状、不同大小的杆(多适用性)上能够实现自主避障的轮式爬杆机器人。
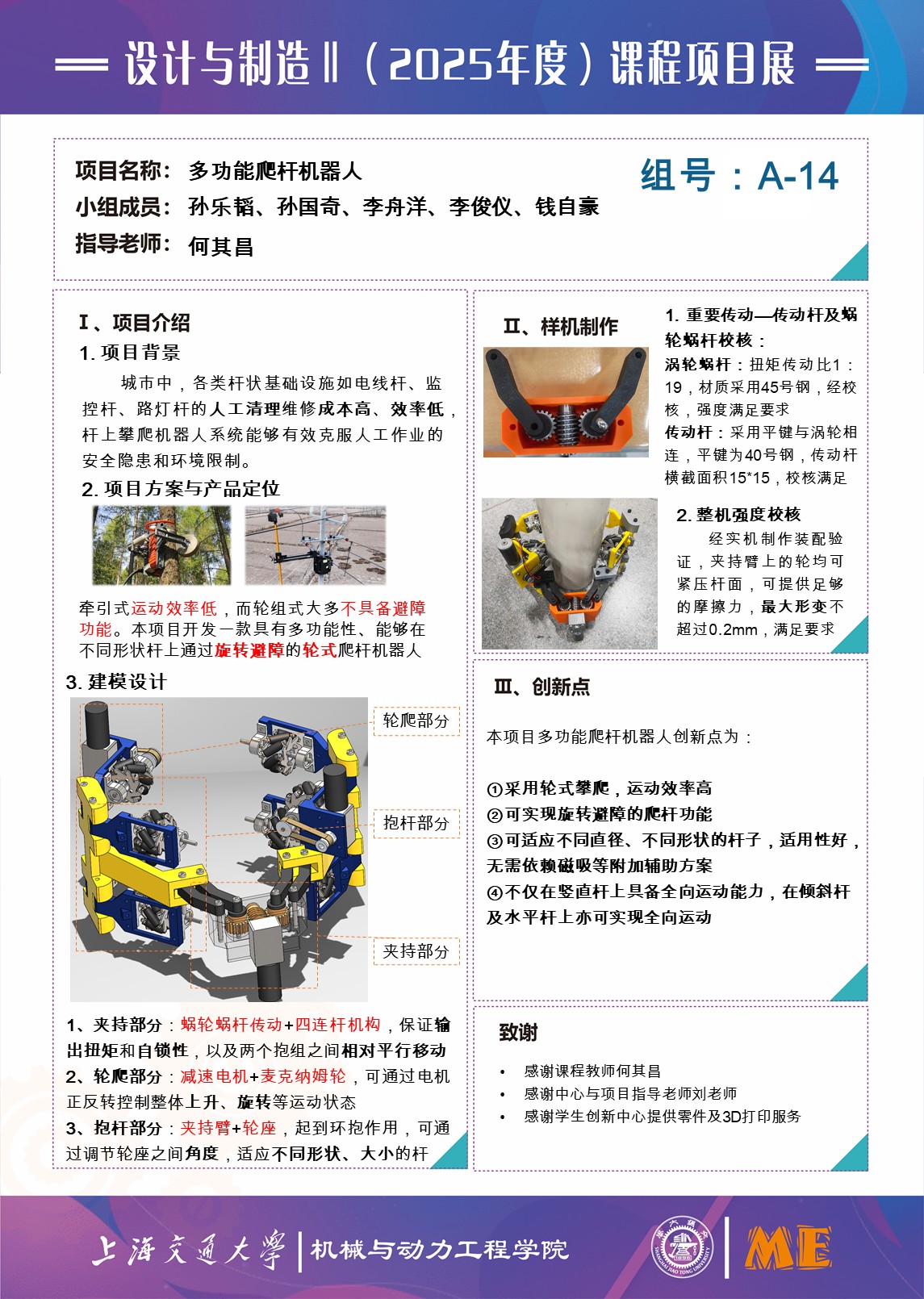
①采用轮式攀爬,运动效率高
②通过麦轮实现旋转避障的爬杆功能
③可适应不同直径、不同形状的杆子,适用性好,无需依赖磁吸等附加辅助方案
④不仅在竖直杆上具备全向运动能力,在倾斜杆及水平杆上亦可实现全向运动
