

本项目以三国时期"木牛流马"为设计灵感,研制了一款仿生式多连杆六足步行机器人。该机器人采用双电机驱动、链传动方式,通过多连杆机构实现仿生足端轨迹,运用三角步态保证运动稳定性,并设计推拉杆式转向机构实现方向控制。整机融合了仿生学原理与机械设计方法,兼具功能性与美学特征。
本项目旨在设计并制作一款具备稳定行走与灵活转向能力的六足步行机器人。具体目标包括:完成多连杆足部机构的运动学设计与优化;实现基于三角步态的平稳行进功能;开发推拉式转向机构以实现方向控制;搭建以树莓派为核心的电控系统,实现对步进电机与舵机的协调控制。
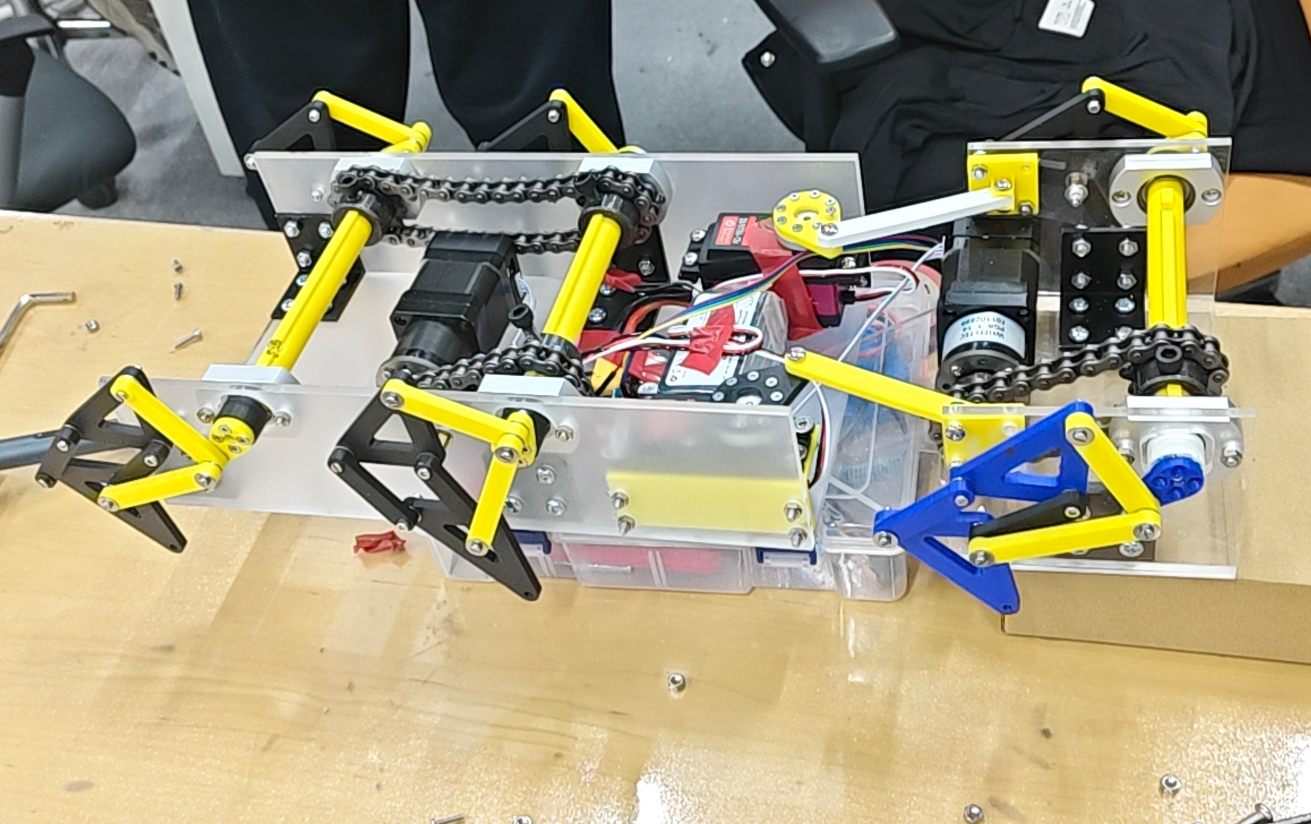
本项目已完成全部预期目标。机械方面,成功设计并装配六足机器人样机,足部采用多连杆机构实现仿生足端轨迹曲线;转向机构创新性地采用推拉杆形式替代传统铰接方式,显著增强了结构承载能力与运动可靠性。电控方面,基于树莓派平台开发了预设程序,实现步进电机与舵机的协调控制。样机已实现直线行走与左右转向功能,验证了设计方案的可行性。
