
本项目由王阳、冯彤、万彦同团队在徐竹田教授 陈伟老师指导下研发,灵感源自第十二届全国大学生机械创新设计大赛 “高性能仿生蝴蝶” 主题,聚焦仿生扑翼飞行器的高机动性、能效性与低可探测性优势,打造一款适用于精准监测等场景的高性能仿生蝴蝶。产品采用轻量化优化设计,以碳纤维复合材料与聚酰亚胺薄膜为翼部主材,搭配 PTK 7350MG-D 伺服电机、开源扑翼机主控板及 7.4V 轻量化电池,核心创新在于四翼独立设计与双向飞行操控能力,通过两台伺服电机独立驱动两侧翅膀,配合 1:1 齿轮实现同相扑翼,借助连杆部件连接翅膀并控制扑翼速度与幅度,整体结构紧凑且符合大赛尺寸≤0.4m、质量≤2kg 的要求。
本项目的核心目标是设计并制作一款高性能仿生蝴蝶,精准模拟真实蝴蝶的扑翼飞行机制,实现大扑翼幅度与低频率运动。具体而言,需满足大赛规定的竖直折叠、遥控或自主飞行、静态起飞及转弯飞行等要求,通过轻量化设计将整体质量控制在较低水平,依托双伺服电机的独立控制实现平稳直线飞行与灵活转向,借助翼脉优化设计最大化升力生成,确保飞行过程稳定、低噪,最终打造一款兼具仿真度与实用性能的仿生扑翼飞行器。
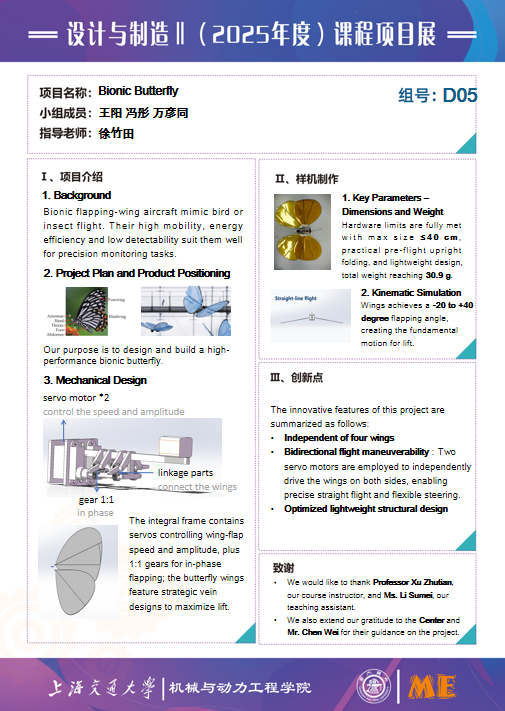
项目已完成仿生蝴蝶的设计、仿真、原型制作与初步飞行验证,达成核心预设目标。设计与制造层面,确定了 “机身集成伺服电机、1:1 齿轮、连杆部件” 的整体架构,翼部采用一体 3D 打印翼脉与碳纤维管 + 聚酰亚胺薄膜的复合结构,整机总质量仅 30.9g,尺寸符合大赛限制,且实现了预飞时的竖直折叠功能。性能与功能层面,通过运动学仿真验证了 - 20°(上扑)至 + 40°(下扑)的非对称扑翼角度,可有效生成升力;借助两侧翅膀扑翼的相位差实现转向,成功完成直线飞行与转弯动作的初步验证;伺服电机、主控板与电池的搭配满足动力与续航需求,各系统协同运行顺畅,为后续减重优化与飞行性能提升奠定了坚实基础。
