
本项目由叶康澍、李昂扬、宋飞鹏团队在徐竹田老师、陈伟老师指导及学生创新中心支持下研发,聚焦应急救援、管道运维、智慧物流等场景中空中侦察与地面操作的复合需求,打造一款具备形态自适应变形能力的陆空两栖四旋翼无人机。产品采用球形外观设计,以 3D 打印与激光切割为主要制造工艺,核心亮点是通过连杆机构实现飞行模态与地面行驶模态的无缝切换,集成轮式底盘、直线推杆升降平台与自平衡控制系统,搭配基于 Arduino 的集成控制系统及优化后的电池与电调系统,兼顾空中巡航效率与地面移动稳定性,可灵活适配多场景作业需求。
本项目的核心目标是研发一款功能完备、切换顺畅的陆空两栖变形无人机,使其具备稳定可靠的空中飞行与地面移动能力:空中模式下,凭借四旋翼布局实现常规起降与巡航,单旋翼在 8000RPM 转速下提升力达 7.06N,四旋翼协同满足承载与机动需求;地面模式下,通过轮式底盘与自平衡系统适应不平整地面,具备一定越障能力;同时实现两种模态的无缝、快速切换,机构在切换后具备自锁功能,保障不同模式下的结构稳定性与作业安全性,最终提升任务执行的安全性、降低操作复杂度、延长设备使用寿命,适配多场景复合任务需求。
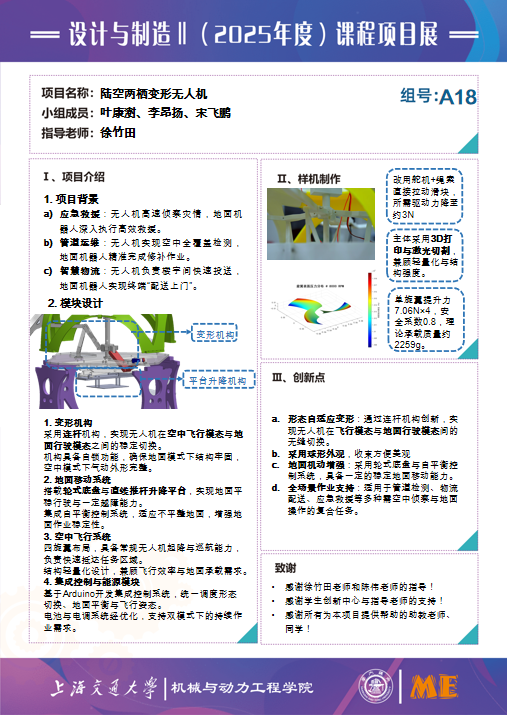
项目已完成陆空两栖变形无人机的设计、仿真、制造与功能演示,达成核心预设目标。设计层面,历经三次版本迭代,将初始的杆滑块机构优化为舵机 - 绳索机构(驱动力降至约 3N),后改用丝杆电机驱动,解决了受力不足与变形效率问题,确定了榫卯连接、螺柱紧固等可靠连接方式;通过流体力学仿真验证了飞行性能,单旋翼在 8000RPM 转速下提升力 7.06N,四旋翼协同配合 0.8 的安全系数,理论承载质量约 2259g。制造与功能层面,完成了整机装配,实现了飞行与地面行驶模态的稳定切换,地面模式下可通过自平衡控制系统保持平稳移动,空中模式具备常规起降与巡航能力;基于 Arduino 开发了舵机控制、电机加速、自平衡核心逻辑及丝杆驱动等程序,实现对形态切换、飞行姿态与地面平衡的统一调度,各系统协同运行顺畅。
