
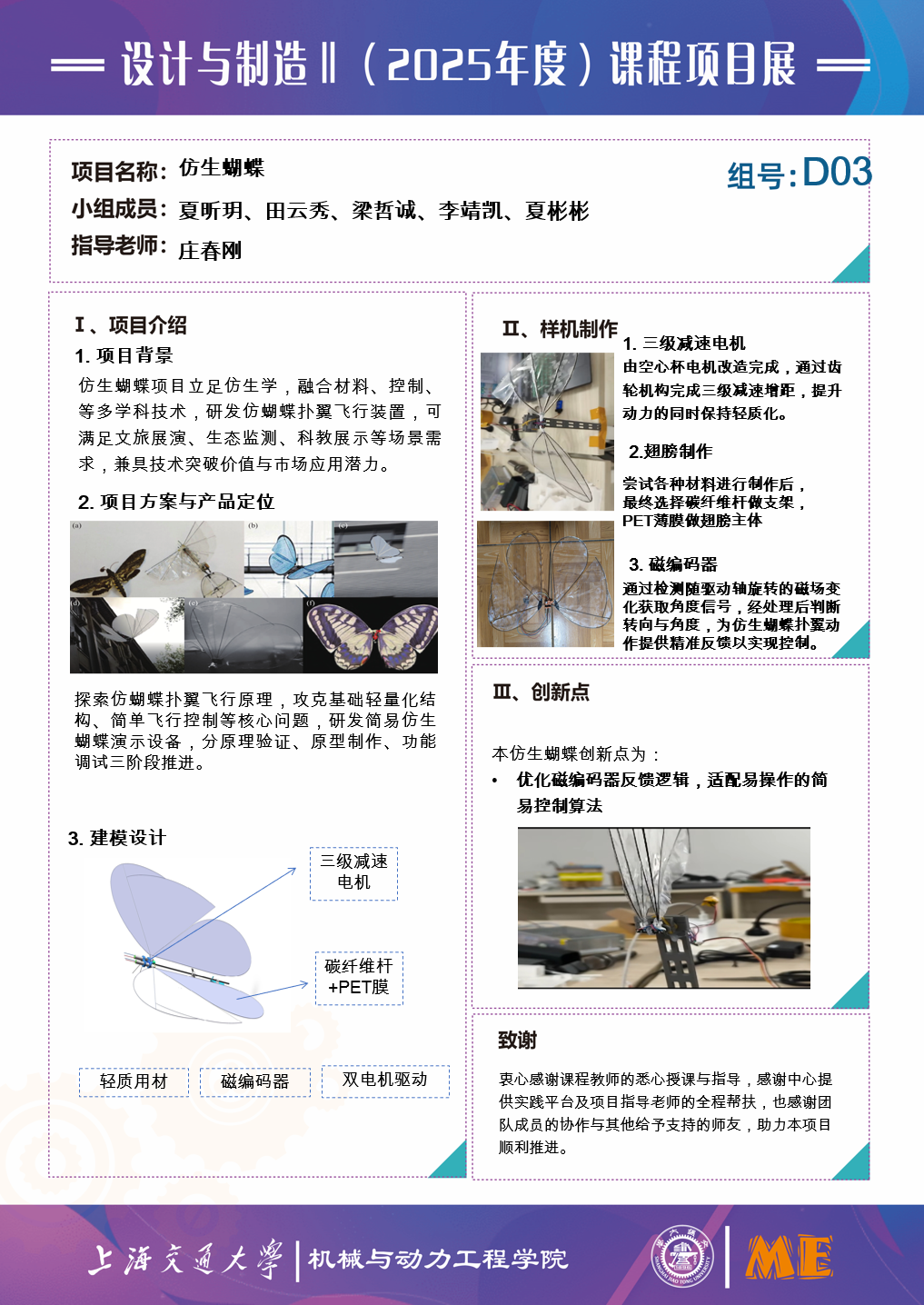
本项目致力于设计并制造一款基于 STM32G031 微控制器的仿生扑翼飞行器(仿生蝴蝶)。在机械结构上,项目采用轻量化的实心碳纤维杆构建骨架,并配合1.26丝 PET 薄膜制作具有气动弹性变形能力的翅膀 。动力与控制系统方面,采用左右双电机独立驱动配合3级减速齿轮箱,以模拟昆虫高扭矩、低频次的扑动特性,并集成 AS5600 磁编码器实现闭环反馈控制 。此外,系统利用 ELRS 无线通信协议解析 CRSF 信号,实现了低延迟的远距离遥控功能 。
项目的核心目标是攻克扑翼机对重量敏感及控制复杂的难题,实现稳定可控的仿生飞行。具体技术目标包括:
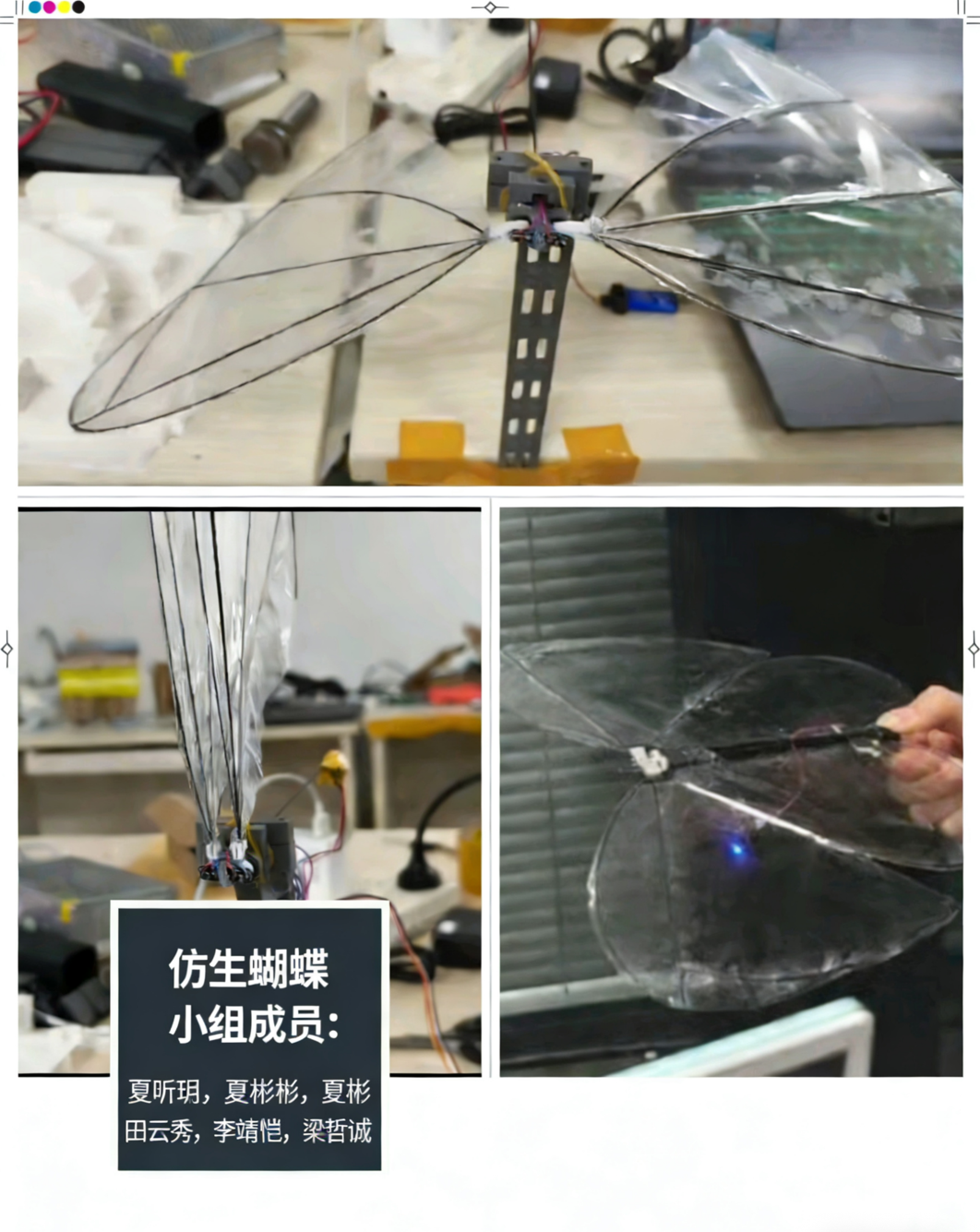
经过硬件集成与算法调试,项目成功完成了仿生蝴蝶的实物制作与飞行测试,主要成果如下:
