
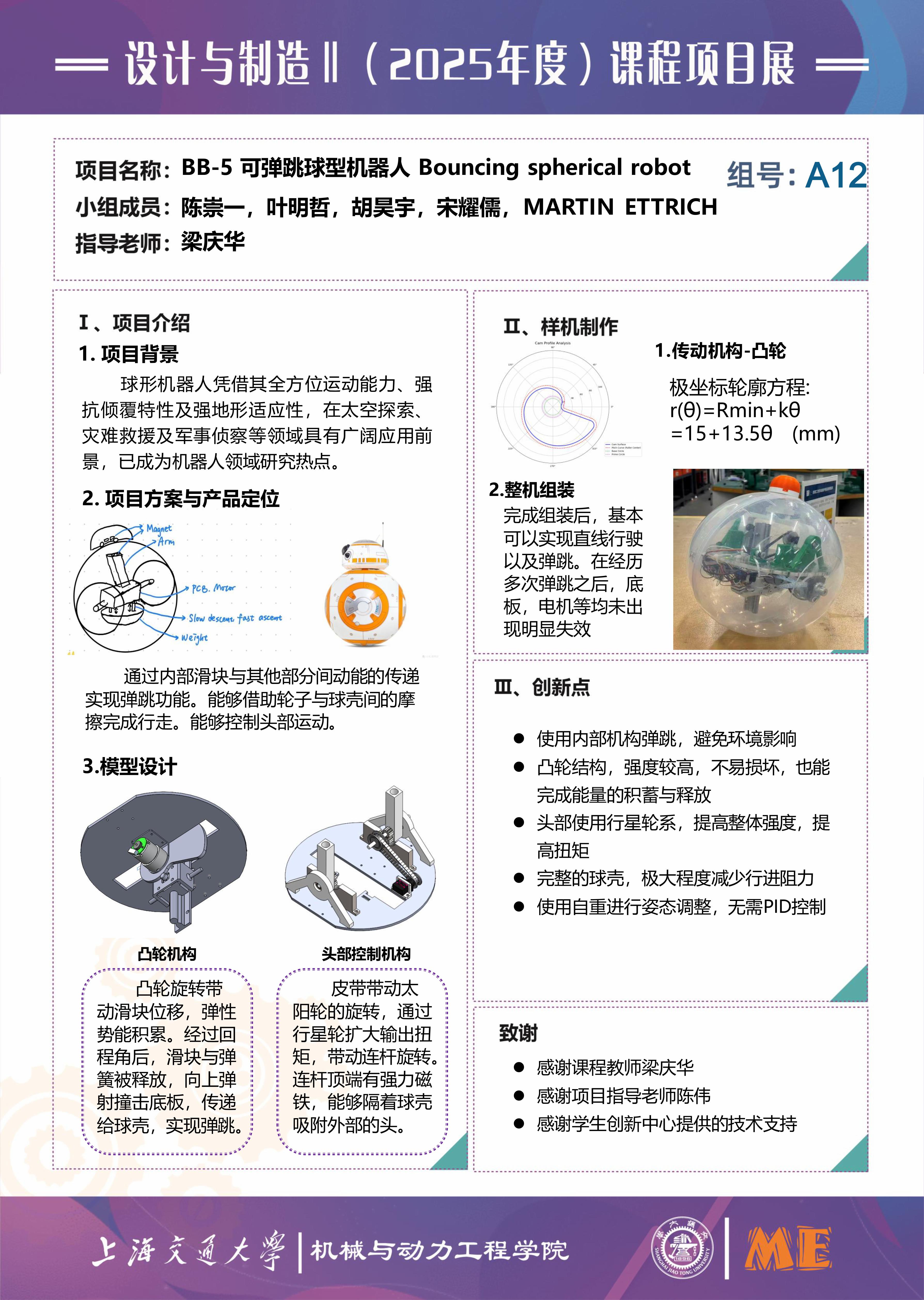
This project designs a spherical robot named BB5 with active jumping capability. To address the difficulty of implementing traditional jumping mechanisms in spherical robots, we employ a cam-slider-spring collaborative energy storage and release system. The mechanism stores energy by using a cam to push a slider and stretch a spring, and releases it to execute the jumping motion. The robot integrates modules such as omnidirectional wheel drive and a planetary gear-based head control system, achieving coordinated jumping, steering, and attitude control within a spherical structure of 300 mm in diameter. The project aims to enhance the mobility of spherical robots in complex terrains, providing new solutions for applications in fields such as exploration and rescue.
Through this project, we aim to overcome the motion limitations of spherical robots by equipping them with active jumping abilities, thereby expanding their application scenarios. For example, in rubble search and rescue, the robot could jump over obstacles or ascend steps; in field inspections, it could navigate trenches and rocky terrain; in interstellar exploration, jumping capability could help traverse small craters or rock barriers.
The final test results showed that the drive part and the head control part worked well, but due to the excessive weight of the robot itself, the bouncing mechanism could not provide enough force to lift the robot off the ground.
Based on the final test results, despite some issues, our product still achieved the expected functionality. In other aspects, our project still has scope for improvement. For example, a posture sensor and a closed-loop control system can be incorporated to enhance the system's robustness.
