
This project presents a bionic autonomous underwater robot aiming to achieve flexible
underwater mobility while minimizing disturbance to the surrounding marine environment and
supporting non-invasive observation tasks. Following a literature-informed concept generation
process, a weighted concept selection method was applied to determine both the propulsion and
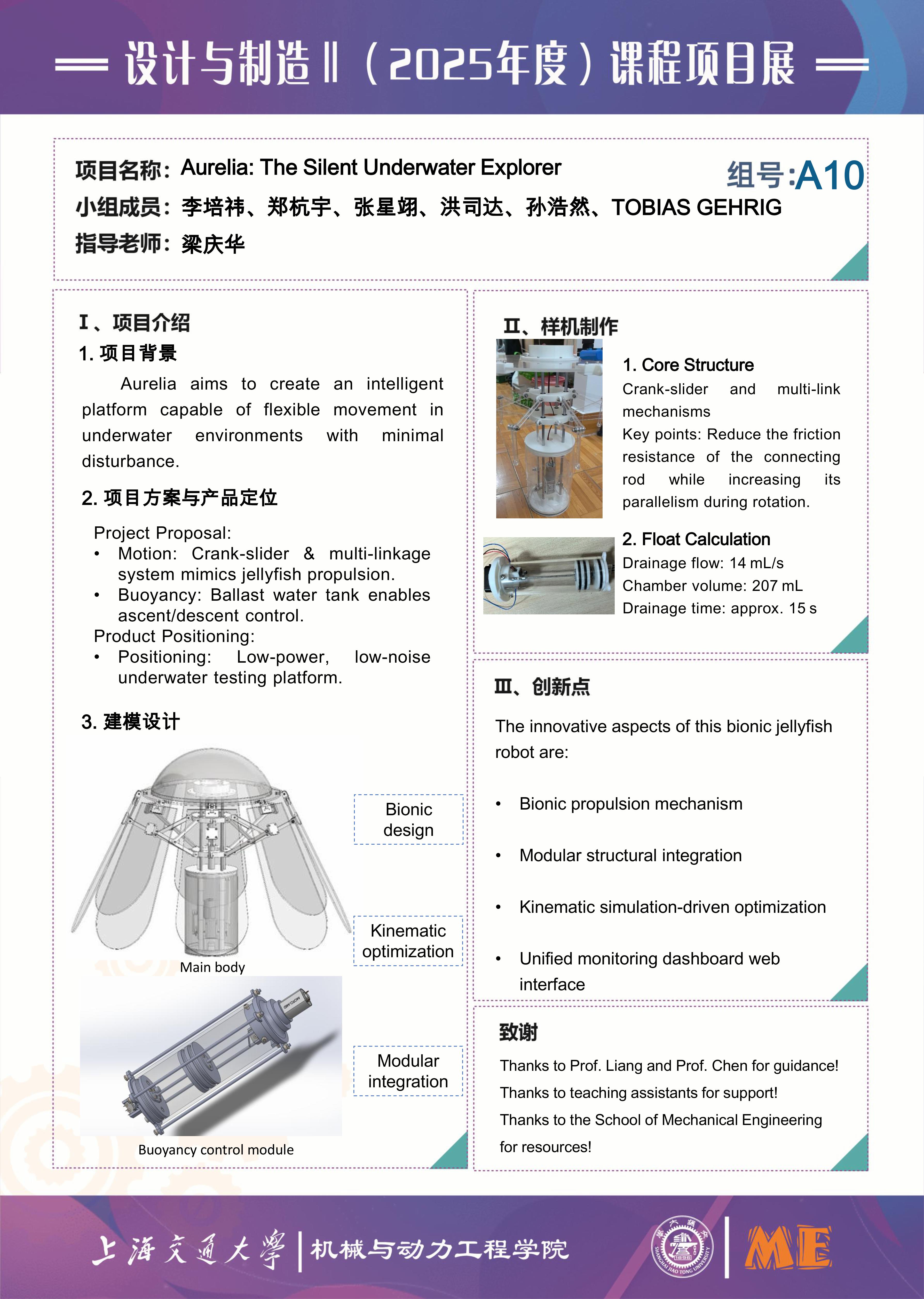
buoyancy solutions. The final propulsion system adopts a quick-return tentacle actuation driven
by two crank–slider mechanisms coupled with a multi-link mechanism, enabling a more natural
extension–contraction cycle and providing the thrust pattern required for jellyfish-like locomotion.
For buoyancy control, a syringe-based water intake mechanism (crank–slider driven) was
selected to realize controllable ballast variation.
The prototype is designed for manufacturability: planar components are primarily laser-cut
(with stainless-steel reinforcement for high-stress members), while geometrically complex parts are
produced via PLA 3D printing, including modular limit tracks for assembly and tuning. The control
system follows a dual-input architecture (remote controller and web interface) coordinated by an
on-board MCU, which integrates motor actuation, LED control, camera streaming, and IMU-based
pose feedback for monitoring. Testing confirms successful reproduction of the contraction–
relaxation motion and real-time telemetry (acceleration, angular acceleration, temperature) with
basic image transmission; remaining performance limits are mainly attributed to joint and track
tolerances, motivating higher-precision bearings and improved fabrication, as well as future
depth/pressure sensing for closed-loop depth control.
Aurelia is a bionic autonomous underwater robot directly inspired by Aurelia aurita, commonly
known as the moon jellyfish—one of nature’s most elegant and efficient swimmers. The core
objective of this project is to develop an intelligent underwater platform that can achieve flexible
movement in marine environments while minimizing disturbance to the surrounding ecosystem.
The research and development of Aurelia are driven by three key motivations: first, to enable
non-invasive marine research, as conventional propeller-based underwater robot generate
substantial noise that disturb marine life and hinder close-range scientific observation, while the
project’s silent biomimetic system reduces environmental impact to facilitate such research; second,
to achieve high energy efficiency, addressing the issue of traditional underwater robots which
require continuous power input and face large water resistance leading to limited endurance by
mimicking the moon jellyfish’s efficient locomotion mechanism that leverages fluid dynamics
principles; and third, to integrate abundant sensing functions to serve as an integrated underwater
observation platform equipped with cameras, temperature sensors, pressure sensors, and other
detection devices.
In conclusion, our bionic autonomous underwater robot, Aurelia, has successfully realized its
core design objectives.
The prototype demonstrates a functional biomimetic locomotion system that closely replicates
the contraction-relaxation motion cycle of a moon jellyfish, enabling silent and efficient underwater
propulsion.
Furthermore, we have established a foundational control and sensing architecture, achieving
real-time data transmission for parameters such as acceleration, angular velocity, and temperature,
alongside basic video streaming capabilities.
Looking ahead, we plan to implement several key enhancements to advance the platform's
autonomy and operational capability. Future development will focus on integrating a closed-loop
buoyancy control system by incorporating pressure and depth sensors, upgrading the onboard
computational unit to handle more complex sensor fusion and navigation algorithms, and refining
the mechanical design to improve joint precision and motion smoothness. These improvements aim
to transform Aurelia into a fully capable, intelligent platform for sustained and non-invasive
underwater observation and research.
