
This report presents the design, implementation, and preliminary evaluation of S.T.E.P.,
a low-cost benchtop gait simulator for footwear testing that reproduces salient features of
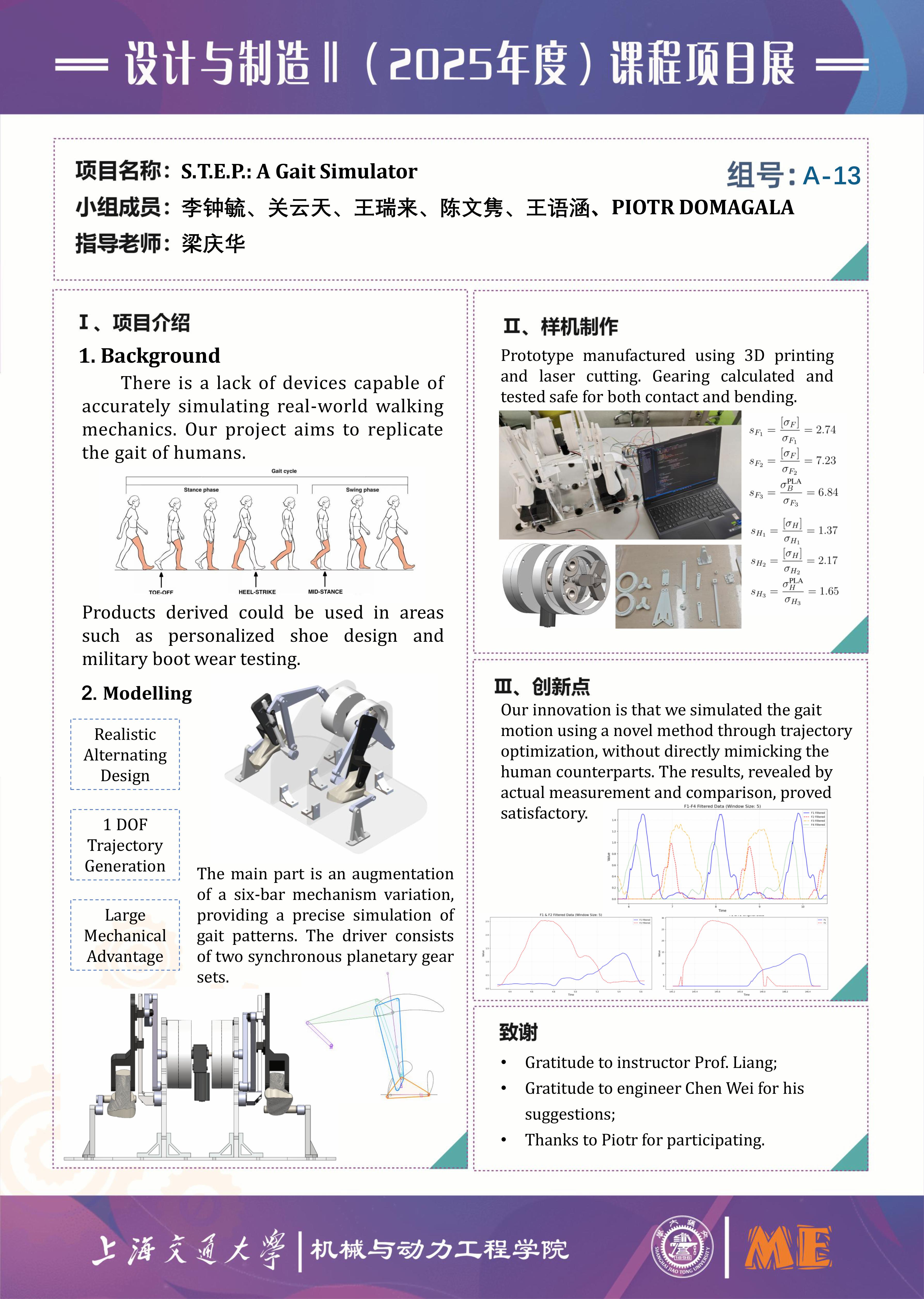
human plantar pressure during walking. The actuation subsystem employs a single double-
head motor coupled to synchronized epicyclic gear reducers to deliver appropriate speed
and torque. The foot mechanism is realized by a Grashof crank–rocker four-bar augmented
to a Stephenson-type six-bar with guided sliders and an auxiliary heel link to produce dwell
at the ankle and forefoot and a quick-return stance–swing asymmetry. Instrumentation con-
sists of piezo-resistive pressure sensors mounted at heel and forefoot, conditioned by a pro-
tection circuit and powered at 5 V; signals are acquired as voltages by an Arduino Nano,
streamed over serial at 115 200 baud, logged to CSV, and visualized in real time. Kine-
matic analyses yield a quick-return ratio K ≈ 1.46; gear-train calculations indicate a trans-
mission ratio of 7 and adequate safety margins in bending and contact stress for the selected
materials. Bench experiments demonstrate consistent cycle-to-cycle waveforms and qualita-
tive agreement between simulated and human plantar pressure profiles. Limitations include
residual vibration transmission and confinement to planar loading. The results support the
feasibility of S.T.E.P. as a reproducible platform for comparative footwear evaluation and
motivate future extensions to multi-axis loading, improved damping, and quantitative cali-
bration.
Our project aims to replicate the walking gait of humans. By combining the input end
composed of motors and planetary gear systems with the foot movement simulation output end
composed of linkage mechanisms, we have achieved the simulation of motor-driven and speed-
adjustable foot movement trajectories. By distributing pressure sensors on the sole, we measure
the changes in sole pressure during the walking process. This not only verifies the success of our
gait simulation but also collects gait pressure data, which is used in areas such as carbon plate
shoe design and military boot wear testing.
First, the axial fixation of the mechanism is not yet sufficiently secure. Despite implementing
damping measures, non-negligible vibration interference remains in the sensor signals. Future
work could further optimize the linkage design, such as adding redundancy or introducing bear-
ings.
Second, the mechanism can only replicate vertical pressure and minimal sliding; it cannot
operate outside this plane to simulate multi-directional ankle rotation or significant sliding of the
sole relative to the ground. Consequently, the overall application scenarios are relatively limited.
In summary, this was a highly interesting endeavor that allowed us to explore the possibilities
of complex mechanisms while simultaneously enhancing our engineering experience.
