
The Fish Master project developed a bionic underwater robot that mimics fish propulsion to overcome limitations of traditional propeller-driven systems, such as noise and poor maneuverability. After a thorough literature review, we selected a motor-driven three-dimensional linkage tail mechanism paired with a center-of-gravity adjustment system for optimal performance and maneuverability. The final design featured a sinusoidal-oscillation tail, four-bar linkage side fins for steering, and waterproof 3D-printed components. Testing confirmed effective linear speed control (3–8V range), reliable steering (55°–125° range), and robust waterproofing. Key innovations included Bluetooth-based remote control, posture adjustment via center-of-gravity manipulation, and a disc mechanism converting rotary motion into sinusoidal tail movement. The robot demonstrated full-directional mobility, meeting all design requirements for applications.
1. Marine observation: It can dive beneath the water surface to conduct environmental monitoring, scientific research and other tasks without affecting the ecosystem.
2. Aquaculture: It can be used to monitor the fish population and drive away predators underwater without disrupting normal lives of aquatic fish.
3. Teaching and entertainment: It can be used for teaching demonstrations of fish movement principles, or as a toy to stimulate students' interest in engineering.
We developed a project called Fish Master, aimed to create a bionic underwater robot inspired by fish propulsion to address limitations of traditional propeller-driven systems, such as noise and poor maneuverability.
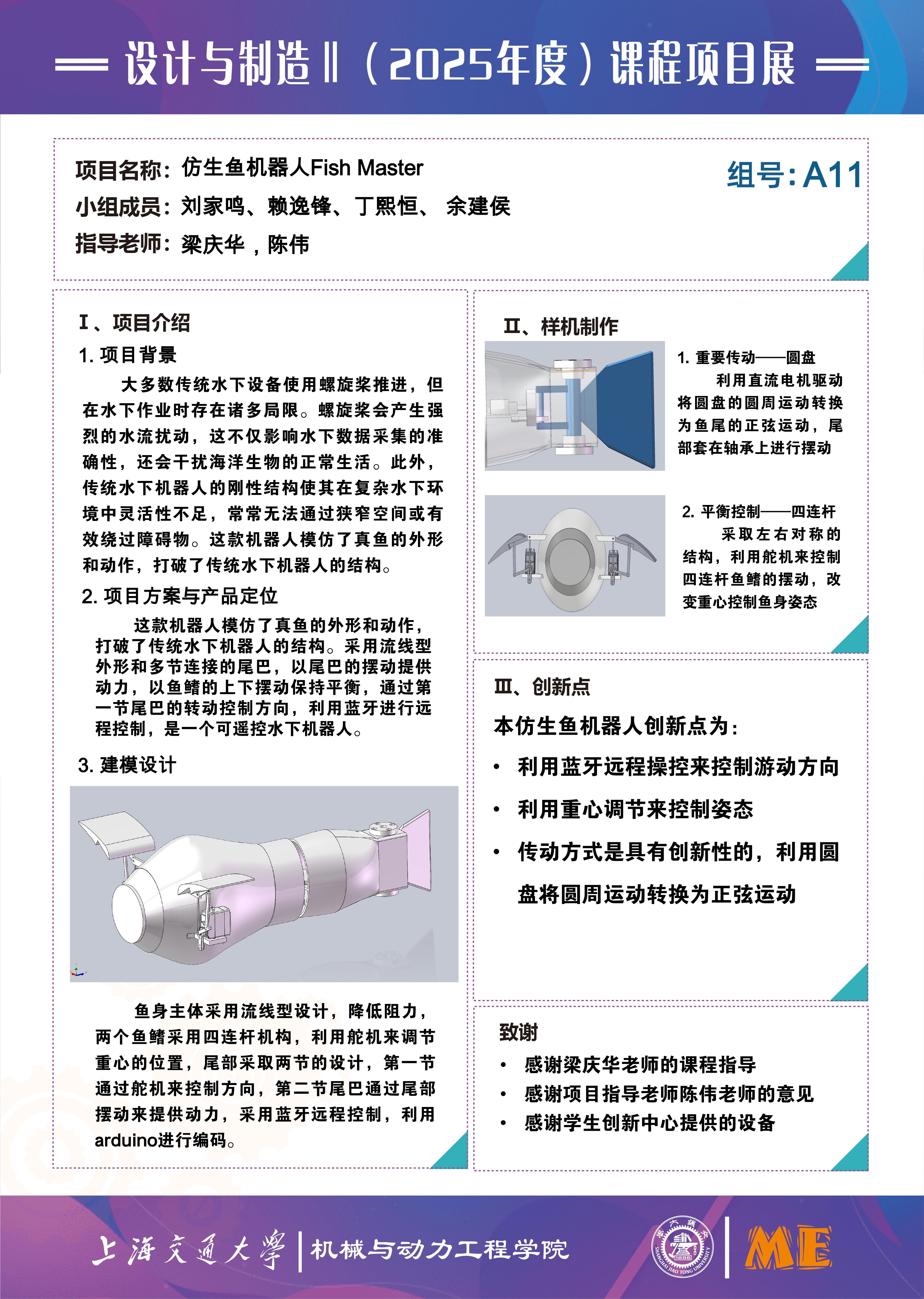
We first conducted a literature review on biomimetic tail mechanisms undefined, generated multiple design concepts, and selected a motor-driven three-dimensional linkage tail for its balance of performance and manufacturability, paired with a center-of-gravity adjustment system for buoyancy control. Then we made detailed design including a sinusoidal-oscillation tail, four-bar linkage side fins for steering, and waterproof 3D-printed components. After assembly, we conducted some testing to validate the tail's linear speed response (3–8V range), steering reliability (55°–125°), and waterproofing.
The project have several highlights, including controlling via Bluetooth, adjusting the posture by controlling the center of gravity, utilizing the disc to convert the circular motion into a sinusoidal motion. It enables movement and floating in all directions, which can meet our design requirements.
